Albert Wang
Albert Wang has had robots on his mind for a long time.
“When I was about four years old,” he recalls, “I dreamt about building a robot vacuum. I remember wandering around the house, while my parents did chores. They were often vacuuming the floor. It was loud and took time. So I thought about making this round thing that could move around autonomously and vacuum things. I was very happy when iRobot finally came out with the Roomba,” he laughs.
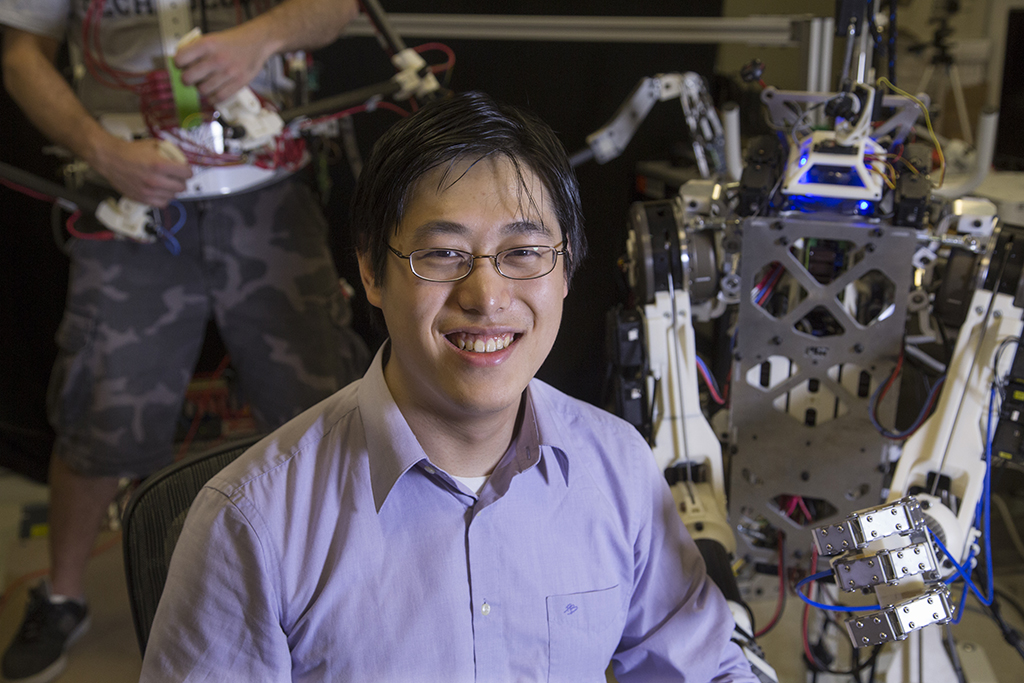
MechE alumna Helen Greiner may have beaten Wang to the robotic vacuum punch, but, having been a member of Associate Professor Sangbae Kim’s Biomimetic Lab since 2010 – first as an undergraduate, then as a master’s student, and now as a PhD candidate – Wang has made up for it. He has been a major contributor to the lab’s work on an untethered running and jumping robotic cheetah and, more recently, a humanoid robot designed for disaster and rescue missions.
“We asked ourselves what the requirements would be for a robot to replace a human in those situations. What would they need to be able to do?”
The response robot would need to complete laborious, heavy-load tasks such as opening a door, axing down an obstacle, or picking up and carrying a heavy object.
“We realized that the robot needed to be exactly like a human,” he says. “Except immune to things like radiation and fire.”
Thus, HERMES was born. A humanoid robot built with powerful but lightweight electric motors and customized actuators, HERMES will be able to walk, run, and jump autonomously toward a specific location, performing any necessary heavy-duty tasks on its way.
But there is something HERMES can’t do: make quick on-the-spot decisions – like the kind people have to make all the time in emergency situations.
The system Wang and the rest of the team has designed requires a human operator to play the brain, while the robot plays the brawn.
“You cannot easily program the type of quick thinking you need in emergency situations,” says Wang, “so we decided that connecting the robot to a human operator was the easiest way to incorporate the kind of intelligence we need. It would take a computer a long time and a lot of programming to come to the quick conclusions that humans come to almost instantaneously through good instincts.”
HERMES was designed to mimic the movements of its human operator through tele-operation and in return to share its vision and physical “feelings” – its proprioception – with him or her. Creating this mapping of bodies between the robot and human and finding a way to share these feelings of force and balance have been the hardest technical challenge the team has had to face. Their solution allows operators to strap into a device that pushes and pulls on them as appropriate to replicate the forces that impact the robot as it moves through the scene. Simultaneously, operators wear a sensor suit that captures their movements and sends that information back to the robot, which then mimics those human movements.
“Physically, humans are slow compared to robots,” says Wang. “But the human mind can work much more quickly and at a much more sophisticated level than a robot, so that’s why we chose to use a human operator. Instead of sending a robot in with its own intelligence, we just feed all this information back to the person. And if we can achieve this, you could say this is the loop closure rate: It would happen so quickly that the human doesn’t even subconsciously think about commanding the robot. They are just feeling something and reacting to it. It’s so instantaneous, it’s almost an extension of themselves.”
Wang and the team of researchers in the Biomimetic Lab – Joao Luiz Souza Ramos, Wyatt Ubellacker, John Mayo, and Justin Cheung – eventually hope to evolve their robotic system to the point where the robot and the operator are both learning from each other and building a valuable synergy that helps to save as many lives as possible.
For Wang’s part, he’s simply following a desire to impact the world for the better.
“Some people are very technology focused,” he says. “But I’m more driven by the impact I can make. If the next problem I encounter happens to be completely different, maybe not even in the field of robotics, I’d consider it a privilege and challenge to work on it.
“But there is always going to be that robotics bent in me,” he laughs. “I’ll find a way to put some automation in it.”