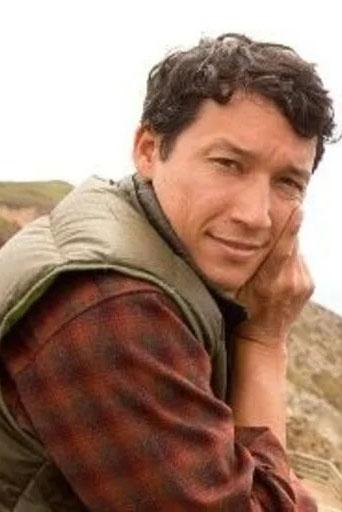
Hugh Herr
Uncomfortable shoes. Awkward crutches. Painful artificial limbs. When technology meets biology, the interface is rarely flawless – and the devices often hinder the bodies they are supposed to help.
Hugh Herr (SM ’93) believes that technologists can do better. An associate professor of media arts and sciences and leader of the Biomechatronics Group in MIT’s Media Lab, Herr is building sophisticated devices that aid human movement by mimicking nature.
It’s unusual to find a researcher whose work and personal history are so entwined, and not just because Herr, himself a double amputee, now walks on bionic legs that his lab designed. As both a rock climber and a user of prostheses, Herr has direct experience with frustratingly poor prosthetic design – and an athlete’s determination to overcome them. His lab is working to understand the tricks the human body uses for moving efficiently, and then translating that knowledge into robotic devices that can not only restore function to those who have lost it but enhance normal human capabilities.
A Redirected Passion
Herr, 50, describes himself as a focused person, and he speaks with a solemnity that makes it easy for people to miss his dry humor. When he was young, that intense focus was directed at one thing: climbing. “My singular objective was to be the best climber in the world,” he says. His academic interests were, he readily admits, nonexistent. In 1982, when he was 17, Herr and a friend were caught in a blizzard while climbing Mount Washington in New Hampshire. They were stranded for three nights before being rescued; one man who was trying to rescue them died. Herr’s frostbitten legs were amputated below the knees.

Photo courtesy of MIT Media Lab.
“It’s alarming to every person who first receives an artificial limb how low-tech and archaic the technology is – certainly back then,” he says. His first prostheses were temporary ones with plaster sockets, and he was instructed not to walk without crutches or another support: the plaster would shatter under his full weight. Later he got permanent prostheses made of wood, rubber, and plastic, but they were stiff and painful.
Yet Herr found that he could still excel in the vertical world of rock climbing. In high school, he had trained in tool and die machining at a vocational school; shortly after returning home from the hospital, he set up a workshop in the garage and put those skills to work designing and building his own prosthetic limbs for rock and ice climbing. “I quickly abandoned this notion that the prosthesis has to look like a human limb, and I started to think: what’s optimal, what’s best for function?” he says. He created tiny feet that could balance on a whisper-thin ledge, and hatchetlike blades that could fit into a crack.
After graduating from Millersville University, Herr came to MIT, where he completed a master’s degree in mechanical engineering in 1993. He also received a PhD in biophysics at Harvard, and worked at MIT’s Leg Lab, which made advances in building legged robots that could walk and run. The lab was then led by Gill Pratt (SB ’83, SM ’87, PhD ’90) – its founder, Marc Raibert, had already left to work full time at the company he founded, Boston Dynamics. When Herr graduated, Pratt hired him as a postdoc.
Pratt was so impressed with Herr’s work that he made him co-director of the lab, though Herr was just a postdoc. “Hugh had tremendous practical knowledge about prosthetics, he had tremendously good intuition about control, and he was also very strong in terms of physics,” says Pratt, now a program manager at DARPA. When Pratt left MIT in 2000, Herr took over the lab, which eventually became the Biomechatronics Group within the Media Lab.
The Science of Walking
At the center of the Biomechatronics Group lab space is a raised platform with a treadmill and a set of hip-high parallel bars. Ten cameras trained on the platform capture the motions of subjects as they run and walk on the treadmill. That’s because an important part of the lab’s work is describing how the human body moves. Walking, though a seemingly simple act, is still largely mysterious, using energy in a very economical manner that is difficult to re-create in robotics.
“We do not entirely understand how the muscles are being controlled, which surprises a lot of people,” Herr says.
His lab’s work to model the human ankle joint ultimately led to the development of the prosthesis Herr uses today, sold as the BiOM T2 by his startup company BiOM (formerly called iWalk). It is the first foot and ankle prosthesis that behaves, as he puts it, more like a motorcycle than a bicycle, meaning that it puts energy into the system rather than relying solely on human power.
In human walking, the calf muscle and the ankle joint contribute the most power. The BiOM T2 uses a battery to power a system of microprocessors, sensors, springs, and actuators; the joint provides stiffness during a heel strike to absorb shock, then power to help propel the lower leg up and forward during a step.
The goal of such devices is to make prostheses more natural and, by lowering the energy costs of walking, reduce joint stress and fatigue. But bringing bionic devices into the clinic is not easy. Bob Emerson, a prosthetist at A Step Ahead Prosthetics who helps connect patients to research projects in Herr’s group, says it’s challenging to persuade insurers to pay for devices like BiOM. “It’s a far-reaching technological platform; people don’t understand it really well,” he says. He says it takes vision and persistence to drive major technological innovations in such a small and specialized market.
There are still drawbacks to current bionic designs – ankle prostheses like Herr’s go through one or two battery charges a day, for instance – so Herr and his colleagues are working to make prosthetic devices smaller, lighter, quieter, and more efficient. They’re also involved in efforts to design more comfortable sockets to attach prosthetic limbs to the body. Humans “are soft and malleable,” says Herr, “and we’re not static; we change in time, we swell, we shrink. So how you attach the machine world to that is a really hard problem.”
Herr has already tackled the problem of giving humans better, more seamless control over artificial limbs; his BiOM ankle prostheses adjust their torque and power in response to muscle contraction. Now he is going a step further, collaborating with surgeons and other researchers on ways to allow bionic limbs to be controlled directly by the nervous system, which he hopes to demonstrate in a human in the next few years.