
Professor
Neville Hogan
Sun Jae Professor of Mechanical Engineering
Interests
- Controlling physical interaction (between humans, robots and tools)
- Human biomechanics and dexterous control of movement
- Agile dynamic locomotion in humans and robots
Professor Hogan News + Media

From 3D-printed limbs to semi-autonomous race cars
In October, MIT International Design Center and MIT Edgerton Center hosted a panel on “Envisioning the Future of Technology-Enabled Mobility” that included J. Kim Vandiver, Dan Frey, Neville Hogan, and Jaya Narain.
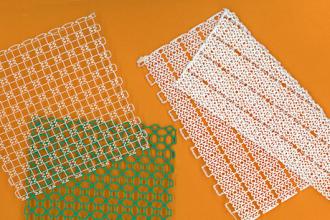
Engineers 3-D print flexible mesh for ankle and knee braces
MIT engineers including Professor John Hart and Professor Neville Hogan have designed 3-D-printed mesh materials whose flexibility and toughness emulates and supports softer tissues such as muscles and tendons.

Understanding and treating disease
MechE researchers across a diverse range of specialties are developing new and innovative ways to deepen our understanding of disease and unlock new therapies to treat it.
Faculty Details
Education
-
1970
DUBLIN INSTITUTE OF TECHNOLOGY
B.Eng. -
1973
MASSACHUSETTS INSTITUTE OF TECHNOLOGY (MIT)
M.Sc. -
1976
MASSACHUSETTS INSTITUTE OF TECHNOLOGY (MIT)
Eng. -
1977
MASSACHUSETTS INSTITUTE OF TECHNOLOGY (MIT)
Ph.D.
Honors + Awards
- 2021 Pioneer in Robotics and Automation Award, IEEE Robotics and Automation Society
- 2020 St. Patrick's Day Medal for Academia, Science Foundation Ireland
- 2018 IEEE Engineering in Medicine and Biology Society (EMBS) Academic Career Achievement Award
- 2009 Rufus T. Oldenburger Medal, American Society of Mechanical Engineers, Dynamic Systems and Control Division
- 2008 Henry M. Paynter Outstanding Investigator Award, American Society of Mechanical Engineers, Dynamic Systems and Control Division
- 2004 Doctor Honoris Causa, Dublin Institute of Technology
- 2004 Silver Medal, Royal Academy of Medicine in Ireland
- 1997 Doctor Honoris Causa, University of Delft
Memberships
- American Society of Mechanical Engineers
- Institute of Electrical and Electronics Engineers
- American Association for the Advancement of Science
- Society for Neuroscience
- Society for Neural Control of Movement
Professional Service
- 2013-present Agricultural, Biological and Cognitive Robotics Center, Ben-Gurion University of the Negev, Executive Scientific Board
- 2006-present Dublin Institute of Technology Foundation, Board of Directors
- 2004-2014 Advanced Mechanical Technologies, Inc., Board of Advisors
- 1998-present Interactive Motion Technologies, Inc., Board of Directors
- 2005-present Senior Editor, IEEE Transactions on Neural Systems and Rehabilitation Engineering
- 2009-present Editorial Board, Journal of Motor Behavior
- 2009-present Editorial Board, Journal of Healthcare Engineering
- 2004-2007 Editorial Board, American Journal of Physical Medicine and Rehabilitation
Teaching
- Biomechanics and Neural Control of Movement (2.184/2.183J/9.34J)
- Advanced System Dynamics and Control (2.151)
- Modeling and Simulation of Dynamic Systems (2.141)
Publications
- Ahn, J., & Hogan, N. (2015). Improved Assessment of Orbital Stability of Rhythmic Motion with Noise. PLoS ONE, 1-12. doi: 10.1371/journal.pone.0119596
- Song, Y. S., & Hogan, N. (2015). A Novel Interactive Exoskeletal Robot for Overground Locomotion Studies in Rodents. IEEE Transactions on Neural Systems and Rehabilitation Engineering. doi: 10.1109/TNSRE.2015.2396852
- Hogan, N. (2014). Robot-Aided Neuro-Recovery. Mechanical Engineering, 136(9), 3-5.
- Lee, H. and Hogan, N. (2014). Time-Varying Ankle Mechanical Impedance during Human Locomotion. IEEE Transactions on Neural Systems and Rehabilitation Engineering, (online). doi: 10.1109/TNSRE.2014.2346927
- Hogan, N. (2014). A General Actuator Model Based on Nonlinear Equivalent Networks. IEEE/ASME Transactions on Mechatronics, 19(6), 1929-1939. doi: 10.1109/TMECH.2013.2294096
- Hogan, N. and Sternad, D. (2013) Dynamic Primitives in the Control of Locomotion Frontiers in Computational Neuroscience 7(71):1-16 doi: 10.3380/fncom.2013.00071
- Hogan, N. and Sternad, D. (2012) Dynamic primitives of Motor Behavior. Biological Cybernetics epub 2012 Nov 3 doi 10.1007/s00422-012-0527-1 PMID: 23124919
Patents
- Patent # 5,466,213 “Interactive Robotic Therapist” Neville Hogan, Hermano Igo Krebs, Andre Sharon and Jain Charnnarong. November 14, 1995.
- Patent # 5,794,621 “System and Method for Medical Imaging Utilizing a Robotic Device, and Robotic Device for Use in Medical Imaging” Neville Hogan, Hermano Igo Krebs. August 18, 1998.
- Patent # 7,284,374 “Actuation System with Fluid Transmission for Interaction Control and High Force Haptics” Stephen Buerger and Neville Hogan. October 7, 2007.
- Patent # 7,454,909 “Impedance Shaping Element for a Control System” Stephen Buerger and Neville Hogan. November 25, 2008.
- Patent # 7,556,606 “Pelvis Interface” Hermano Igo Krebs, Neville Hogan and Michael Roberts. July 7, 2009.
- Patent # 7,618,381 “A Wrist Robot for Rehabilitation, Psychophysics and Haptic Interface” James Celestino, Neville Hogan, Hermano Igo Krebs, Dustin Williams. November 17, 2009.
- Patent # 7,926,269 Method for Controlling a Dynamic System” Stephen Buerger and Neville Hogan. April 19, 2011.
- Patent # 8,608,674 B2 “Pelvis Interface” Hermano Igo Krebs, Neville Hogan and Michael Roberts. December 17, 2013